



গুদামে বিভিন্ন ধরণের স্টোরেজ তাক রয়েছে এবং স্টোরেজ এবং পুনরুদ্ধারের পদ্ধতিগুলি প্রধানত নিম্নলিখিত বিভাগে বিভক্ত, যার মধ্যে রয়েছে ম্যানুয়াল স্টোরেজ এবং পুনরুদ্ধার, ফর্কলিফ্ট স্টোরেজ এবং পুনরুদ্ধার এবং স্বয়ংক্রিয় স্টোরেজ এবং পুনরুদ্ধার। আজকাল, অনেক উদ্যোগ স্বয়ংক্রিয় গুদাম অপারেশন উপলব্ধি করতে চায়, তাই তারা স্বয়ংক্রিয় গুদাম তাক ব্যবহার করতে চায়। উদাহরণস্বরূপ, ফোর-ওয়ে কার র্যাক হল এক ধরনের স্বয়ংক্রিয় স্টোরেজ র্যাক। কিভাবে চার-মুখী শাটল AGV গুদামে প্রবেশ করে এবং প্রস্থান করে? গুদাম ভারী শেলফ উত্পাদন উদ্ভিদ Haigris বিশ্লেষণ.

চার দিকে শাটল গুদাম
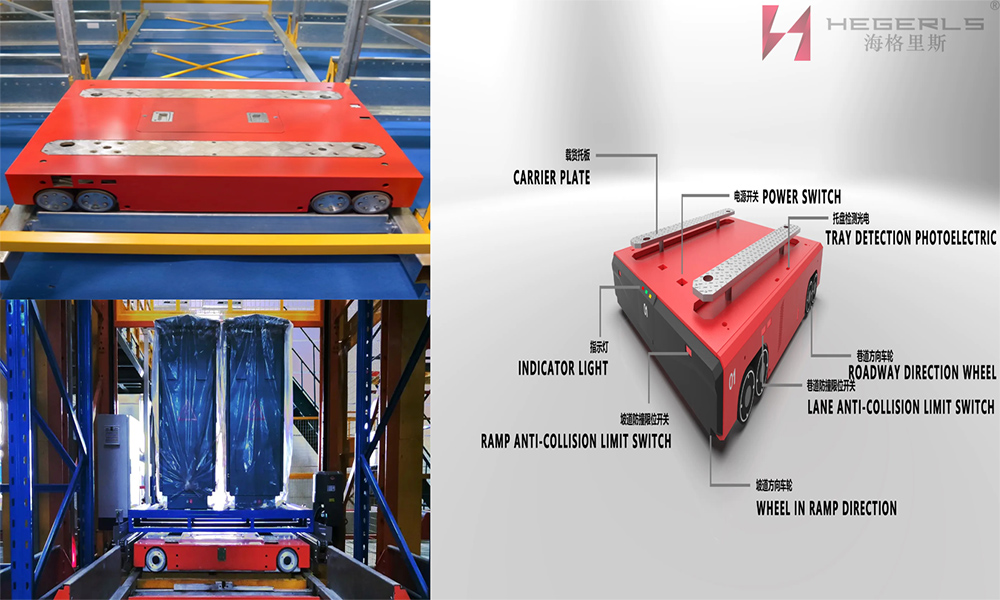
ফোর-ওয়ে শাটল গাড়িটি 12টি চাকা দিয়ে সজ্জিত, যা ট্র্যাক প্লেন বরাবর চার দিকে ভ্রমণ করতে পারে এবং গুদাম সমতলের যে কোনও পণ্যসম্ভারের জায়গায় অবাধে পৌঁছাতে পারে। চার-মুখী শাটলটি একই সময়ে উভয় দিকে চাকা দ্বারা চালিত হয় যাতে এটি নিশ্চিত করা যায় যে অপারেশন চলাকালীন গাড়ির বডিটি বিচ্যুত না হয় এবং এটি ত্রিমাত্রিক শেল্ফের অনুদৈর্ঘ্য এবং ট্রান্সভার্স রেল বরাবর পর্যায়ক্রমে চলতে পারে।

একই সময়ে, ফোর-ওয়ে শাটল একটি বুদ্ধিমান হ্যান্ডলিং ডিভাইস যা শুধুমাত্র অনুদৈর্ঘ্যভাবে হাঁটতে পারে না কিন্তু পার্শ্বীয়ভাবেও চলতে পারে। চার-মুখী শাটলের উচ্চ নমনীয়তা রয়েছে, এটি ইচ্ছামতো কাজের রাস্তা পরিবর্তন করতে পারে এবং শাটল গাড়ির সংখ্যা বাড়িয়ে বা হ্রাস করে সিস্টেমের ক্ষমতা সামঞ্জস্য করতে পারে। প্রয়োজনে, সিস্টেমের সর্বোচ্চ মান কার্যকরী যানবাহন দলের শিডিউলিং মোড প্রতিষ্ঠা করে, প্রবেশ এবং প্রস্থান অপারেশনের বাধা সমাধান করে এবং একে অপরের সাথে প্রতিস্থাপন করা যেতে পারে, যখন একটি শাটল বা লিফট ব্যর্থ হয়, অন্যান্য সিস্টেমের ক্ষমতাকে প্রভাবিত না করেই অপারেশন সম্পূর্ণ করা চালিয়ে যেতে শাটল বা লিফটগুলি প্রেরণ সিস্টেমের মাধ্যমে প্রেরণ করা যেতে পারে। এই ডিভাইসটি কম প্রবাহ এবং উচ্চ-ঘনত্বের সঞ্চয়স্থানের পাশাপাশি উচ্চ প্রবাহ এবং উচ্চ-ঘনত্বের স্টোরেজ উভয়ের জন্যই উপযুক্ত। এটি বৃহত্তর দক্ষতা, খরচ এবং সম্পদ অর্জন করতে পারে।
কিভাবে চার-মুখী শাটল AGV গুদামে প্রবেশ করে এবং প্রস্থান করে?

1) গুদামজাতকরণ পদ্ধতি
ক) বুদ্ধিমান চার-মুখী শাটলের প্রযুক্তিবিদরা প্রথমে বুদ্ধিমান চার-মুখী শাটলটি চালু করে এবং এটি প্রস্তুত করে। বুদ্ধিমান চার-মুখী শাটল স্ট্যান্ডবাই আছে;
খ) বুদ্ধিমান চার-মুখী শাটলের বাছাইয়ের অবস্থান নিশ্চিত করার পরে, WCS বুদ্ধিমান চার-মুখী শাটলের বর্তমান অবস্থান এবং গন্তব্য অবস্থান অনুসারে ড্রাইভিং রুট পরিকল্পনা করবে এবং তারপর কর্মীরা বুদ্ধিমান চার-মুখী শাটলের কাছে পণ্য বিতরণ করবে। WCS মাধ্যমে শাটল;
গ) বুদ্ধিমান ফোর-ওয়ে শাটল প্রাপ্ত টাস্ক কমান্ড অনুযায়ী ডেলিভারি টাস্ক চালাতে শুরু করে;
ঘ) ক্রসিং ট্র্যাকে, বুদ্ধিমান চার-মুখী শাটল প্রকৃত দূরত্বের মধ্য দিয়ে স্থানচ্যুতি মোডে ভ্রমণ করে। ড্রাইভিং প্রক্রিয়া চলাকালীন, এটি ক্রমাগত ট্র্যাকগুলি স্ক্যান করে যা গাড়ির শরীরের নীচের অংশের মধ্য দিয়ে যায়। প্রতিটি ক্রসিং পজিশন এটি পাস করে, এটি ট্র্যাকগুলি স্ক্যান করে এটি যে দূরত্ব অতিক্রম করে তা বিচার করে এবং ক্যালিব্রেট করে। যখন এটি গন্তব্যের কাছাকাছি থাকে, এটি পার্কিং অবস্থানের সঠিক অবস্থান অর্জনের জন্য পার্শ্বীয় লেজার সেন্সরের মাধ্যমে পার্কিং অবস্থানকে সূক্ষ্ম সুর করে;
e) সাব চ্যানেলে, বুদ্ধিমান ফোর-ওয়ে শাটল ক্রস ট্র্যাক এবং সাইড ক্রমাঙ্কন মিরর প্রতিফলক স্ক্যান করতে পারে, পয়েন্ট পজিশন স্ক্যান করে ড্রাইভিং দূরত্ব বিচার করতে এবং পরীক্ষা করতে পারে এবং গন্তব্যে পৌঁছানোর জন্য সাব চ্যানেলে সঠিক অবস্থান নিয়ন্ত্রণ অর্জন করতে পারে;
f) যখন বুদ্ধিমান চার-মুখী শাটল নির্বাচিত বাছাই পজিশনে পৌঁছায়, তখন প্যালেট ড্রপ হয়ে যায়, পণ্যগুলি শেলফে রাখা হয় এবং WCS সিস্টেমকে ডেলিভারি টাস্ক সম্পূর্ণ হওয়ার বিষয়ে অবহিত করা হয়;
ছ) বুদ্ধিমান ফোর-ওয়ে শাটল টাস্ক নির্দেশনা পেতে থাকে বা স্ট্যান্ডবাই এলাকায় ফিরে আসে।
2) ডেলিভারি পদ্ধতি
ক) বুদ্ধিমান চার-মুখী শাটলের প্রযুক্তিবিদরা প্রথমে বুদ্ধিমান চার-মুখী শাটলটি চালু করে এবং এটি প্রস্তুত করে। বুদ্ধিমান চার-মুখী শাটল স্ট্যান্ডবাই আছে;
খ) বুদ্ধিমান চার-মুখী শাটলের বাছাইয়ের অবস্থান নিশ্চিত করার পরে, WCS বুদ্ধিমান চার-মুখী শাটলের বর্তমান অবস্থান এবং গন্তব্য অবস্থান অনুসারে ড্রাইভিং রুট পরিকল্পনা করবে এবং তারপর কর্মীরা বুদ্ধিমান চারের কাছে পিকিং টাস্ক পাঠাবে। - WCS মাধ্যমে শাটল;
গ) বুদ্ধিমান ফোর-ওয়ে শাটল প্রাপ্ত টাস্ক কমান্ড অনুযায়ী পণ্য তুলতে শুরু করে;
ঘ) ক্রসিং ট্র্যাকে, বুদ্ধিমান চার-মুখী শাটল প্রকৃত দূরত্বের মধ্য দিয়ে স্থানচ্যুতি মোডে ভ্রমণ করে। ড্রাইভিং প্রক্রিয়া চলাকালীন, এটি ক্রমাগত ট্র্যাকগুলি স্ক্যান করে যা গাড়ির শরীরের নীচের অংশের মধ্য দিয়ে যায়। প্রতিটি ক্রসিং পজিশন এটি পাস করে, এটি ট্র্যাকগুলি স্ক্যান করে এটি যে দূরত্ব অতিক্রম করে তা বিচার করে এবং পরীক্ষা করে। গন্তব্যের কাছে যাওয়ার সময়, এটি সুনির্দিষ্ট অবস্থান নিয়ন্ত্রণ এবং পার্কিং অর্জনের জন্য পার্শ্বীয় লেজার সেন্সরের মাধ্যমে পার্কিং অবস্থানকে সূক্ষ্ম সুর করে;
ঙ) সাব চ্যানেলে, বুদ্ধিমান ফোর-ওয়ে শাটল গাড়ি ক্রস ট্র্যাক এবং সাইড ক্রমাঙ্কন আয়না প্রতিফলক স্ক্যান করে, এই পয়েন্টগুলি স্ক্যান করে ড্রাইভিং দূরত্ব বিচার করে এবং ক্যালিব্রেট করে এবং গন্তব্যে পৌঁছানোর জন্য সাব চ্যানেলে সুনির্দিষ্ট অবস্থানের নিয়ন্ত্রণ উপলব্ধি করে। .
পোস্টের সময়: সেপ্টেম্বর-19-2022